





オーストリアのヨハネス・ケプラー大学の科学者たちは、高速で走ったり、泳いだり、ジャンプすることができる操縦可能なソフトロボット“soft electromagnetic robots(SEMRs)”を開発したことを、ネイチャー コミュニケーションズにて発表した。
このSEMRsは試験中に、70BL/s(体長/秒)という速度を記録し、これはチーターの最大速度である23BL/sを大きく超える速度だという。しかし、SEMRsは数ミリメートルほどの大きさなので、チーターと同じサイズのSEMRsがチーターより速く走るかどうかは今後の開発次第だという。
出典:Science X: Phys.org, Medical Xpress, Tech Xplore YouTube
SEMRsの構造
ソフトロボットと呼ばれるロボットは、工場や展示会などで見られる従来のロボットとは違い、ポリマーや形状記憶合金といった柔軟性のある材料を使用して構築されています。
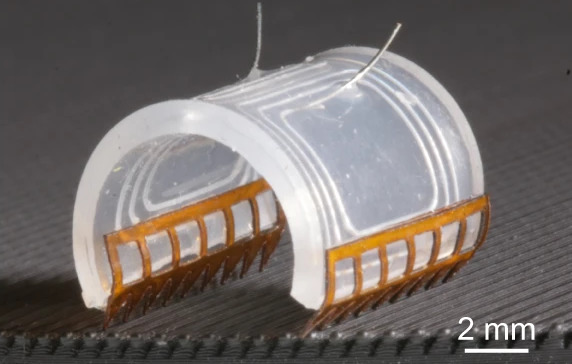
そして、今回のSEMRsの特徴の一つとして挙げられるのが、一般的に使用されている材料ではなく、ガリウムやインジウム、スズの共晶合金であるガリンスタンという液体金属合金が使用されていることです。
ヨハネス・ケプラー大学の物理学者Guoyong Maoによると「この材料の最も重要な特徴は、室温で液体に似た性質(Liquid-like)を持ち、導電性が高く、変形可能なコイルや柔らかさを構築するののに役に立つことです」という。
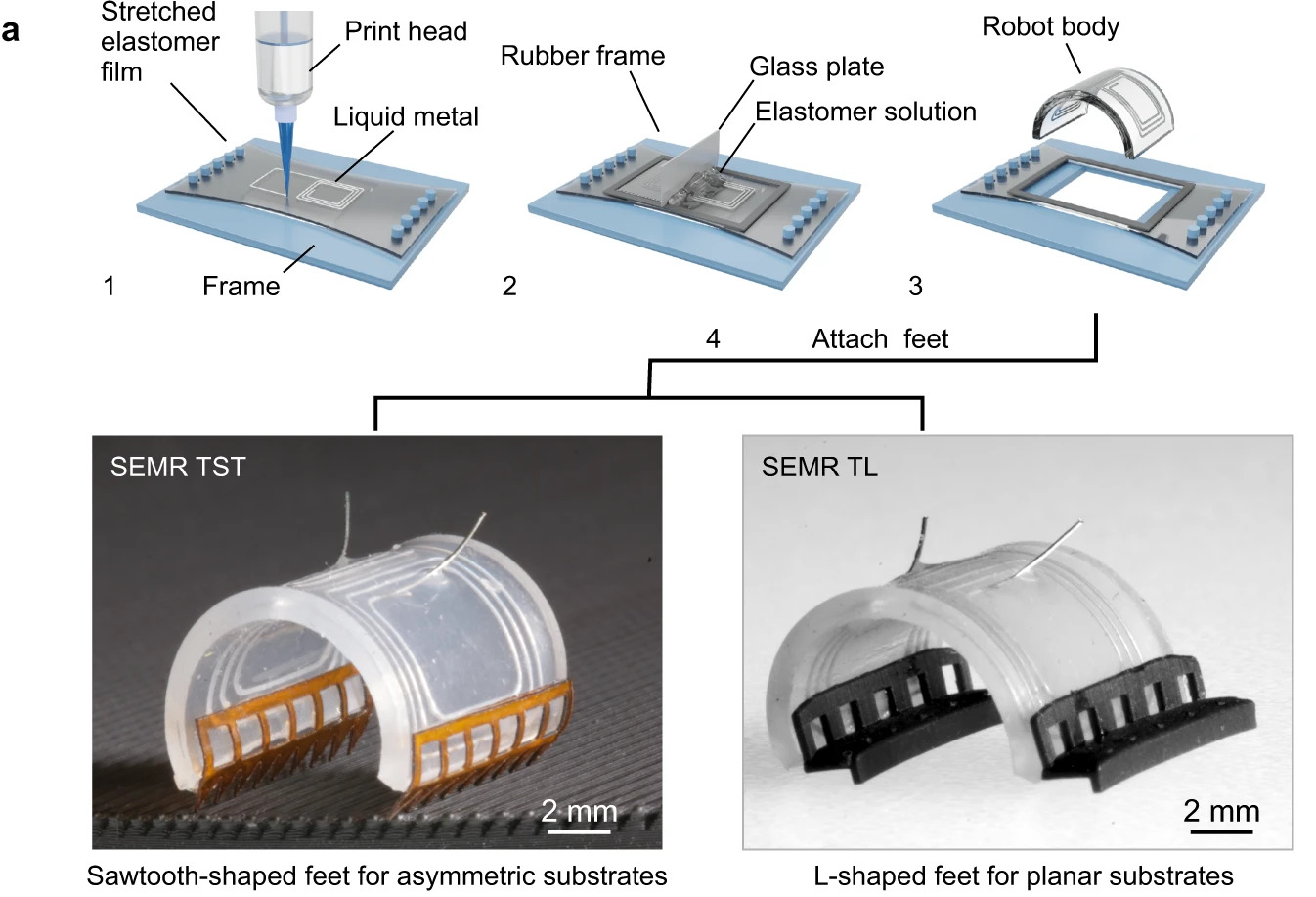
そのガリンスタン製コイルをアクチュエータと共にエラストマー(弾性のある)フィルムに埋め込むことで、ロボットのボディが出来上がり、それぞれの基板に対応する、L字型またはのこぎり型の足を装着することでSEMRが完成する。
また、物理学者Guoyong Maoは「SEMRはロボット工学分野における将来的に大きな可能性を秘めた最新技術です。SEMRのように高速で多くのタスクを実行できる、柔軟で機能性に長けた材料を使用している、似たような技術を知らない」とも述べています。
今後も歩行や水泳から貨物の輸送といった様々な行動が可能な汎用性の高いSEMRsのシリーズを開発を進めるとし、製造方法や設計、モデリングの進歩によってはさらにロボットの性能を向上させることができるとしている。
現在、ソフトロボットはさまざまな種類が存在しており、海からプラスチック廃棄物を取り除くものや、月や火星の砂漠を研究することを可能にしています。そんな中、ソフトロボットの速度は大きな制限となっており、SEMRにある技術がその制限を取り払う可能性を秘めている。
他にも、SEMRsは医療分野で大きく貢献することができるとしており、大腸内視鏡検査などSEMRsに置き換わる可能性があり、従来の診断ロボットでは検査が難しい身体器官などをチェックする際に大きな役割を果たすかもしれません。
Nature communications 元記事
Tiny robots made of “galinstan” can run faster than a (scaled down) cheetah 元記事
ARTICLE